Планарные антенные системы BlueTooth в сотовых телефонах
Рассматриваются вопросы применения планарных микрополосковых антенн в системе беспроводной локальной связи Bluetooth. Рассмотрены конструкции и методы анализа планарной керамической антенны, с учётом потерь в керамике. Для численного анализа антенны в корпусе использована программа HFSS. Для конкретной телефонной трубки выполнены расчёты: распределение тока по поверхности металлического, покрытого сверху диэлектриком, корпуса телефона, диаграммы направленности для различной ориентации сотового телефона. Дан обзор серийных Bluetooth-антенн, а также рекомендации по установке этих антенн в корпус.
Введение
Увеличение скорости обмена информацией способствовало развитию беспроводных систем связи на "домашнем" уровне. Персональные компьютеры и ноутбуки, сотовые телефоны, CD- и МР3-плееры, цифровые фото- и видеокамеры и масса других цифровых устройств (рис. 1), часто подсоединяемых друг к другу и к стационарным компьютерам, создали проблему их связи.
Рисунок 1. Система ближней локальной связи с использованием беспроводной технологии Bluetooth

Кабель стал неудобен - подключаться надо часто, размеры самого кабеля с разъёмами едва не больше собственно подключаемого устройства и так далее. На этом фоне резко возросла актуальность беспроводных локальных технологий WLAN (Wireless Local Area Networking), обеспечивающих бесконтактное подключение устройства к диску ведущего компьютера.
В результате была предложена и стала быстро развиваться система беспроводной связи Bluetooth (рис. 1). В спектре радиочастот ей отведено 79 каналов в полосе 37 МГц (примерно 2 МГц каждый) в диапазоне 2,4465-2,4835 ГГц.
Суть стандарта Bluetooth в оснащении электронных устройств приёмопередатчиками, работающими на частоте 2,45 ГГц, имеющими радиус действия до 10 м и скорость передачи информации до 1 Мбит/с. Возможности применения данных устройств поистине безграничны. Беспроводные наушники, мышки, клавиатуры, соединение мобильных телефонов и ноутбуков, обмен информацией между карманными компьютерами - всего не перечислить.
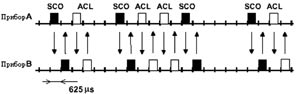
Система Bluetooth работает в разрешённой полосе 2,45 ГГц (полоса промышленного, научного и медицинского применения ISM - Industry, Science, Medicine), что позволяет свободно использовать устройства Bluetooth во всём мире. Технология использует скачкообразную перестройку частоты (1600 скачков/с) с расширением спектра. При работе передатчик перескакивает с одной рабочей частоты на другую по псевдослучайному алгоритму. Для разделения приёмного и передающего каналов используется временное разделение (рис. 2). Поддерживается синхронная и асинхронная передача данных и обеспечивается интеграция с TCP/IP. Временные интервалы синхронизированы для передачи пакетов, каждый из которых передаётся на своей частоте радиосигнала.
Рисунок 2. Поочередной обмен данных между прибором A и прибором B
Потребление мощности устройств Bluetooth должно быть в пределах 0,1 Вт. Каждое устройство имеет уникальный 48-бит сетевой адрес, совместимый с форматом стандарта локальных сетей IEEE 802.
Основным принципом построения систем Bluetooth [4] является использование метода расширения спектра при скачкообразном изменении частоты (FHSS - Frequency Hop Spread Spectrum). Весь выделенный для Bluetooth-радиосвязи частотный диапазон 2,402…2,480 ГГц разбит на N частотных каналов. Полоса каждого канала 1 МГц, разнос каналов - 140…175 кГц. Для кодирования пакетной информации используется частотная манипуляция.
Для США и Европы N = 79. Исключение составляют Испания и Франция, где для Bluetooth применяется 23 частотных канала. Смена каналов производится по псевдослучайному закону с частотой 1600 Гц. Постоянное чередование частот позволяет радиоинтерфейсу Bluetooth транслировать информацию по всему диапазону ISM и избежать воздействия помех со стороны устройств, работающих в этом же диапазоне. Если данный канал зашумлён, то система перейдёт на другой, и так будет происходить до тех пор, пока не обнаружится канал, свободный от помех.
Быстрому старту системы Bluetooth немало способствовала простота структуры. В её состав входят радиомодуль-трансивер, контроллер связи (он же процессор) и управляющее устройство, собственно реализующее протоколы Bluetooth верхних уровней, а также интерфейс с терминальным устройством. Причём если трансивер и контроллер связи - это специализированные микросхемы (интегральные или гибридные), то устройства управления связью реализованы на стандартных микроконтроллерах, сигнальных процессорах, либо его функции поддерживают центральные процессоры мощных терминальных устройств (например, ноутбуков).
Кроме того, в устройствах Bluetooth применяют интегральные схемы, используемые в других приложениях, поскольку СВЧ-диапазон 2 ГГц освоен достаточно хорошо, а заложенные в Bluetooth технические решения сами по себе особой новизны не содержат. В самом деле, схема модуляции - широко распространена, технология расширения спектра методом частотных скачков хорошо отработана, мощность мала.
Ключ к успеху Bluetooth-технологии - радиоприёмопередатчик. Низкая цена и малая мощность были первичными соображениями как при реализации технических требований интерфейса (короткая воздушная радиолиния), так и при проектировании приёмопередатчика. Технология Bluetooth позволяет создать однокристальный приёмопередатчик, объединяя ВЧ-схему и схему обработки цифровых потоков на одном кремниевом кристалле.
Приемопередатчик Bluetooth
Приёмопередатчик Bluetooth может быть разделен на три функциональных блока (рис. 3). Радиоблок содержит преобразователи вверх и вниз по ВЧ, ПЧ с полосой модулирующих частот, фильтр канала, модулятор/демодулятор и синтезатор частот.
Рисунок 3. Основные элементы приёмопередатчика Bluetooth
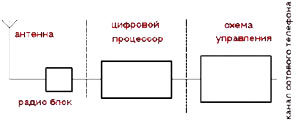
Радиоблок выполняет преобразование FM-сигнала на частоте 2,45 ГГц в битовый поток и наоборот. Антенна - очень важный элемент системы. Антенна должна быть всенаправленной и иметь усиление 0 dBi, присутствие пользователя не должно влиять на распространение сигнала. Из-за маленькой длины волны на частоте 2,45 ГГц размер антенны ограничен несколькими см. В настоящее время чаще всего применяются плоские или PIFA антенны, однако предложены ещё более миниатюрные конструкции E-типа на керамической подложке. Антенна дополняется полосовым фильтром, выделяющим частоту 2,45 ГГц из полосы ISM.
Чтобы реализовать простые и устойчивые приёмники и некогерентное детектирование, Bluetooth использует двоичную частотную манипуляцию (ЧМ, FSK), с обкатыванием частотного скачка Гауссовым импульсом, со скоростью 1 МБит/с. Площадь такого сигнала BT = 0,5, где B - полоса, T - длительность импульса, при индексе модуляции от 0,28 до 0,35 и длительности импульса 1 мкс. ЧМ устраняет потребность в АРУ, которой трудно работать при переключениях частот, и когда данные поступают в неравномерных временных интервалах. Входная часть ВЧ-приёмника состоит из преобразователя с понижением частоты, полосового фильтра канала и частотного детектора.
Фильтр канала выделяет полосу 1 МГц, и к нему предъявляются довольно высокие требования избирательности. Поскольку полоса ISM должна быть разделена с другими системами в данной полосе (среди которых могут быть и другие системы Bluetooth), должны быть приняты меры для предотвращения взаимодействия приборов. Обычно приёмник Bluetooth строится с преобразованием частоты вниз (то есть когда зеркальный канал попадает в полосу ПЧ). Для развязки рядом работающих систем Bluetooth коэффициенты блокирования по зеркальному каналу должны быть 20, 30 и 40 дБ для первого, второго и третьего соседних каналов.
Из-за особенностей эксплуатации системы Bluetooth, технические требования к интермодуляции жёстче, чем к чувствительности приёмника.
Чтобы перекрыть расстояние 10 м с выходной мощностью 0 дБм, достаточна чувствительность приёмника Pмин = -70 дБм. С учётом уровня шума на входе приёмника -114 дБм (в шумовой полосе 1 МГц) и требования на выходе приёмного тракта Km = 21 дБ, для обеспечения максимального коэффициента ошибок передачи информации BER = 0,1% получаем, что коэффициент шума равен 13 дБ. Эта величина рассчитывается из формулы для чувствительности
Pмин = -174 дБм + NF + 10lgB + a + Km, (1)
где -174 дБм - мощность теплового (kTB) шума в полосе 1 Гц в нормальной температуре; NF - коэффициент шума, дБ; B - полоса частот перед демодулятором, 1 МГц; a - порог срабатывания, a = 3 дБ; Km - коэффициент, зависящий от вида модуляции.
По сравнению с коэффициентом шума, достигнутым на сегодня, который значительно ниже 13 дБ, эта величина кажется довольно плохим значением. Однако, это невысокое требование позволяет использовать дешёвые компоненты с потерями и обеспечивает защиту от мешающих сигналов (наводки в подложке и по разводке питания).
(с) В. Калиничев, А. Курушин, В. Недера







 Похожие темы
Похожие темы

 Комбинированный вид
Комбинированный вид